HC-SR04 Ultrasonic Distance Sensor
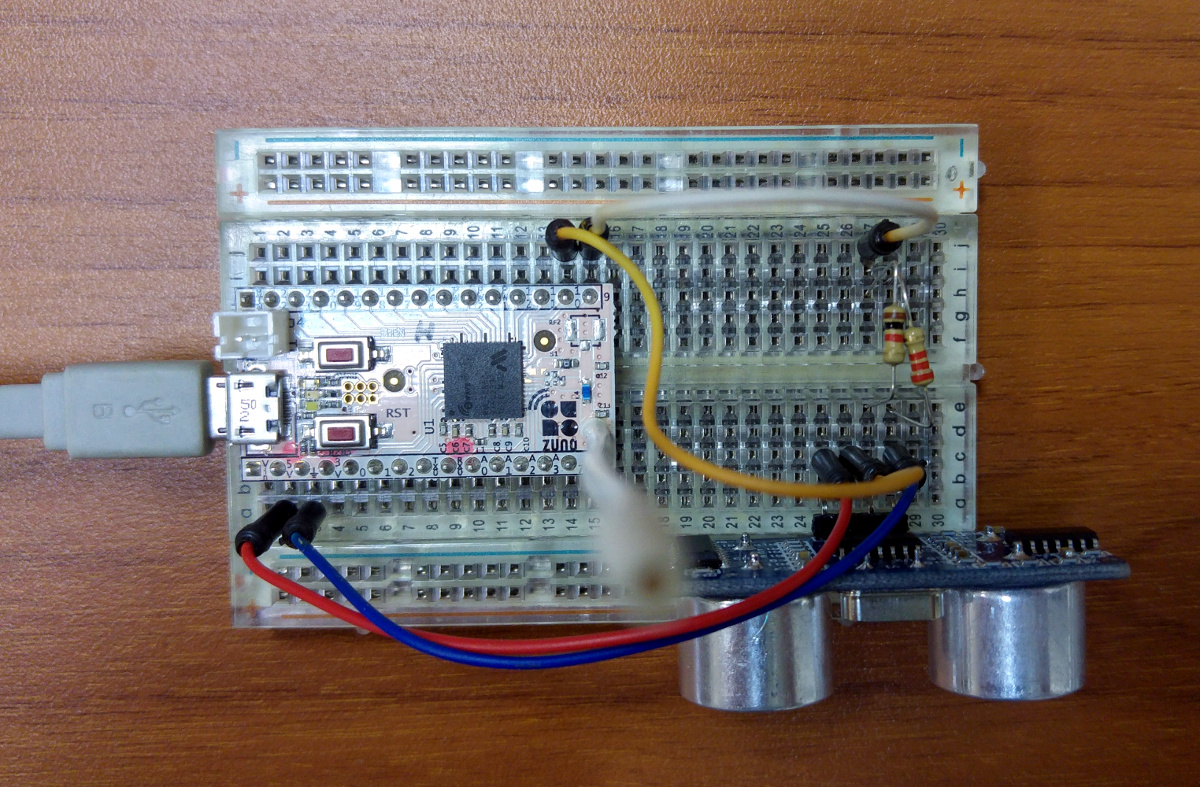
This sketch shows how to connect HC-SR04 Ultrasonic Distance Sensor (or Range Finder) to the Z-Uno board. Distance value is read from sensor and reported periodically to channel Multilevel Sensor.Two resistors are used to shift voltage from 5 V to 3 V. Z-Uno can survive 5 V input too, but it is not recommended.
Note that HC-SR04 is very sensItive to power supply. If power supply is not enough (to low current), HC-SR04 will return shorter distance.

Download Fritzing project
// HC-SR04 Ultrasonic Distance Sensor
ZUNO_SETUP_CHANNELS(
ZUNO_SENSOR_MULTILEVEL(
ZUNO_SENSOR_MULTILEVEL_TYPE_DISTANCE,
0, // scale is meters
SENSOR_MULTILEVEL_SIZE_TWO_BYTES,
2, // two decimals after dot
getter
)
);
ZUNO_SETUP_ASSOCIATIONS(ZUNO_ASSOCIATION_GROUP_SET_VALUE); // to control other devices
int turn_on_distance_cm = 50; // Turn on light in CTRL_GROUP_1 if distance is < 50 cm
int readPin = 9;
int triggerPin = 10;
byte controlState = 0;
word lastValue;
void setup() {
Serial.begin();
pinMode(readPin, INPUT);
pinMode(triggerPin, OUTPUT);
digitalWrite(triggerPin, LOW);
}
void loop() {
int tmp;
// trigger measurement
digitalWrite(triggerPin, LOW);
delayMicroseconds(10);
digitalWrite(triggerPin, HIGH);
delayMicroseconds(10);
digitalWrite(triggerPin, LOW);
// read pulse width
tmp = pulseIn(readPin, HIGH, 100000);
if (tmp != 0) {
lastValue = tmp / 58; // convert to cm, see datasheet
Serial.println(lastValue);
// send On/Off to control group
if (lastValue < turn_on_distance_cm && controlState == 0) {
zunoSendToGroupSetValueCommand(CTRL_GROUP_1, 255);
controlState = 255;
} else if (lastValue >= turn_on_distance_cm && controlState == 255) {
zunoSendToGroupSetValueCommand(CTRL_GROUP_1, 0);
controlState = 0;
}
// send report to controller (Life Line group)
zunoSendReport(1);
}
delay(1000);
}
word getter() {
return lastValue;
}
Download this sketch