10 Channels Certified Sketch
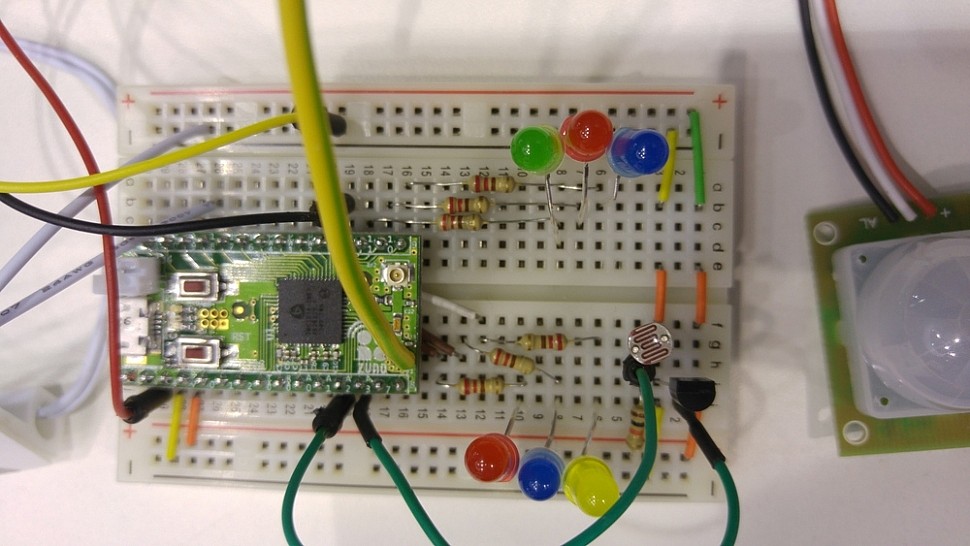
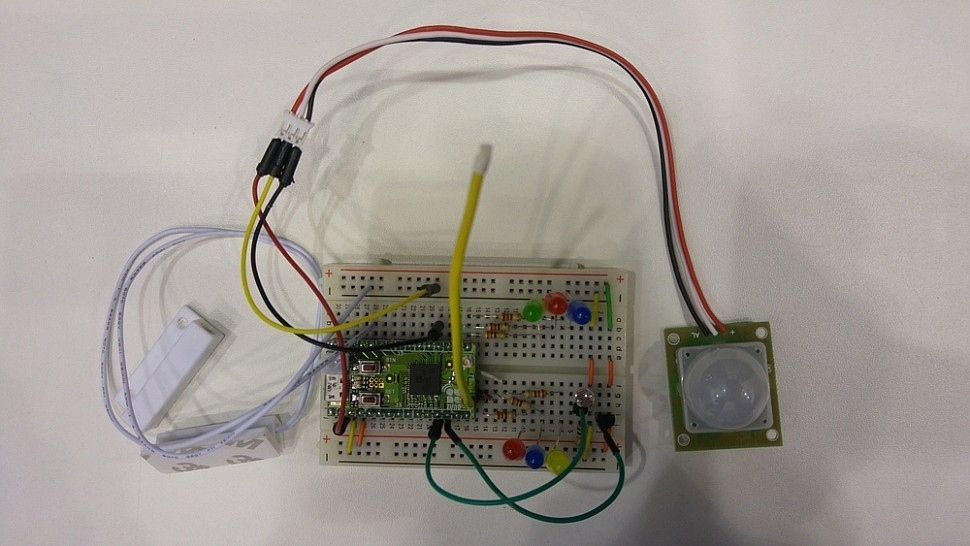
 This is one of the two sketches used in Z-Uno Z-Wave Plus certification (certificate ZC10-16065104). It consist of a very complex mains power device with 3 LED switches, 3 LED dimmers, light, temperature and motion sensors as well as reed switch.
This is one of the two sketches used in Z-Uno Z-Wave Plus certification (certificate ZC10-16065104). It consist of a very complex mains power device with 3 LED switches, 3 LED dimmers, light, temperature and motion sensors as well as reed switch.
As an example motion sensor switches on/off devices in association group #2. Z-Uno 2 certified example is locate here.

Download Fritzing project
/*
* This scretch was certified by the Z-Wave Alliance as one of the two reference Z-Uno sketches.
*
* 3 switches
* 3 dimmers
* 1 motion sensor
* 1 temperature sensor
* 1 luminance sensor
* 1 door sensor
*
*/
// Pins definitions
#define LedPin1 9
#define LedPin2 10
#define LedPin3 11
#define LedPin4 PWM2
#define LedPin5 PWM3
#define LedPin6 PWM4
#define MotionPin 12
#define LumiPin A2
#define TemperaturePin A3
#define DoorPin 19
#define SWITCH_ON 0xff
#define SWITCH_OFF 0
// Global variables to store data reported via getters
byte switchValue1 = 0;
byte switchValue2 = 0;
byte switchValue3 = 0;
byte dimValue1 = 0;
byte dimValue2 = 0;
byte dimValue3 = 0;
byte lastMotionValue = 0;
byte lastLumiValue = 0;
byte lastTemperatureValue = 0;
byte lastDoorValue = 0;
word relaxMotion = 0;
ZUNO_SETUP_SLEEPING_MODE(ZUNO_SLEEPING_MODE_ALWAYS_AWAKE);
ZUNO_SETUP_ASSOCIATIONS(ZUNO_ASSOCIATION_GROUP_SET_VALUE); // Send Basic Set to association group
// Set up 10 channels
ZUNO_SETUP_CHANNELS(
ZUNO_SWITCH_BINARY(getterSwitch1, setterSwitch1),
ZUNO_SWITCH_BINARY(getterSwitch2, setterSwitch2),
ZUNO_SWITCH_BINARY(getterSwitch3, setterSwitch3),
ZUNO_SWITCH_MULTILEVEL(getterDim1, setterDim1),
ZUNO_SWITCH_MULTILEVEL(getterDim2, setterDim2),
ZUNO_SWITCH_MULTILEVEL(getterDim3, setterDim3),
ZUNO_SENSOR_BINARY_MOTION(getterMotion),
ZUNO_SENSOR_MULTILEVEL(ZUNO_SENSOR_MULTILEVEL_TYPE_LUMINANCE, SENSOR_MULTILEVEL_SCALE_PERCENTAGE_VALUE, SENSOR_MULTILEVEL_SIZE_ONE_BYTE, SENSOR_MULTILEVEL_PRECISION_ZERO_DECIMALS, getterLuminance),
ZUNO_SENSOR_MULTILEVEL_TEMPERATURE(getterTemperature),
ZUNO_SENSOR_BINARY_DOOR_WINDOW(getterDoor)
);
void setup() {
// set up I/O pins. Analog and PWM will be automatically set up on analogRead/analogWrite functions call
pinMode(LedPin1, OUTPUT);
pinMode(LedPin2, OUTPUT);
pinMode(LedPin3, OUTPUT);
pinMode(MotionPin, INPUT_PULLUP);
pinMode(DoorPin, INPUT_PULLUP);
}
void loop() {
byte currentMotionValue;
byte currentLumiValue;
byte currentTemperatureValue;
byte currentDoorValue;
// Trigger motion and wait for relax (about 5 sec) before report idle
currentMotionValue = !digitalRead(MotionPin);
if (currentMotionValue) {
if (relaxMotion == 0) {
lastMotionValue = 1;
zunoSendReport(7);
zunoSendToGroupSetValueCommand(CTRL_GROUP_1, SWITCH_ON);
}
relaxMotion = 1900; // impirical for ~5 sec relax time
}
if (lastMotionValue == 1 && relaxMotion == 0) {
lastMotionValue = 0;
zunoSendReport(7);
zunoSendToGroupSetValueCommand(CTRL_GROUP_1, SWITCH_OFF);
}
if (relaxMotion) relaxMotion--;
// Luminosity
currentLumiValue = (byte)(100 - analogRead(LumiPin)*25/256);
if ((currentLumiValue > (lastLumiValue + 5)) || (currentLumiValue < (lastLumiValue - 5))) {
lastLumiValue = currentLumiValue;
zunoSendReport(8);
}
// TMP36 analog temperature sensor
currentTemperatureValue = analogRead(TemperaturePin) * 40 / 124 - 50; // from TMP36 spec (40/124 ~= 3.3*100/1024)
if ((currentTemperatureValue > (lastTemperatureValue + 1)) || (currentTemperatureValue < (lastTemperatureValue - 1))) {
lastTemperatureValue = currentTemperatureValue;
zunoSendReport(9);
}
// Door/Window sensor
currentDoorValue = digitalRead(DoorPin);
if (currentDoorValue != lastDoorValue) {
lastDoorValue = currentDoorValue;
zunoSendReport(10);
}
}
// Getters and setters
void setterSwitch1(byte value) {
digitalWrite(LedPin1, (value > 0) ? HIGH : LOW);
switchValue1 = value;
}
byte getterSwitch1(){
return switchValue1;
}
void setterSwitch2(byte value) {
digitalWrite(LedPin2, (value > 0) ? HIGH : LOW);
switchValue2 = value;
}
byte getterSwitch2(){
return switchValue2;
}
void setterSwitch3(byte value) {
digitalWrite(LedPin3, (value > 0) ? HIGH : LOW);
switchValue3 = value;
}
byte getterSwitch3(){
return switchValue3;
}
void setterDim1(byte value) {
if (value > 99) value = 99;
analogWrite(LedPin4, ((word)value)*255/99);
dimValue1 = value;
}
byte getterDim1(void) {
return dimValue1;
}
void setterDim2(byte value) {
if (value > 99) value = 99;
analogWrite(LedPin5, ((word)value)*255/99);
dimValue2 = value;
}
byte getterDim2(void) {
return dimValue2;
}
void setterDim3(byte value) {
if (value > 99) value = 99;
analogWrite(LedPin6, ((word)value)*255/99);
dimValue3 = value;
}
byte getterDim3(void) {
return dimValue3;
}
byte getterMotion(void) {
return lastMotionValue ? 0xff : 0;
}
byte getterLuminance(void) {
return lastLumiValue;
}
byte getterTemperature(void) {
return lastTemperatureValue;
}
byte getterDoor(void) {
return lastDoorValue ? 0xff : 0;
}
Download this sketch
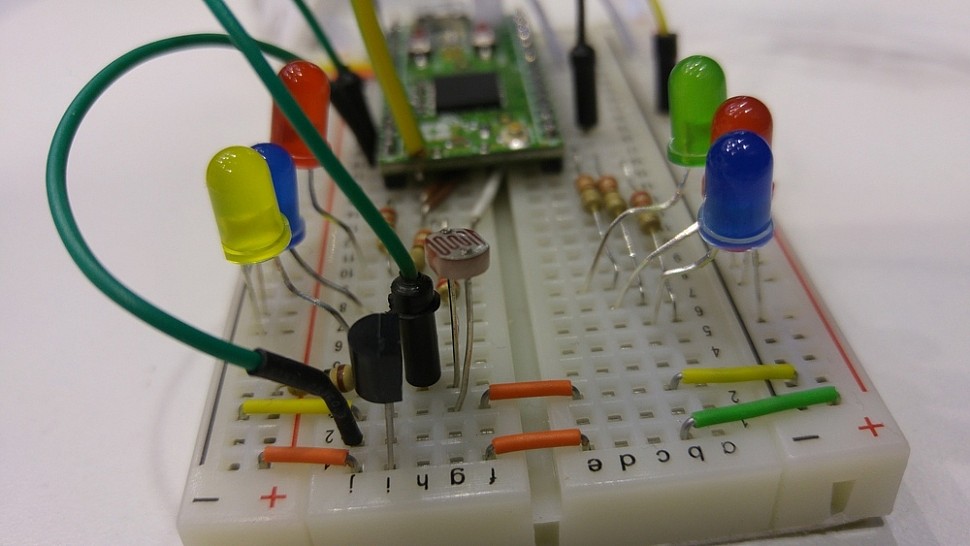
More photos