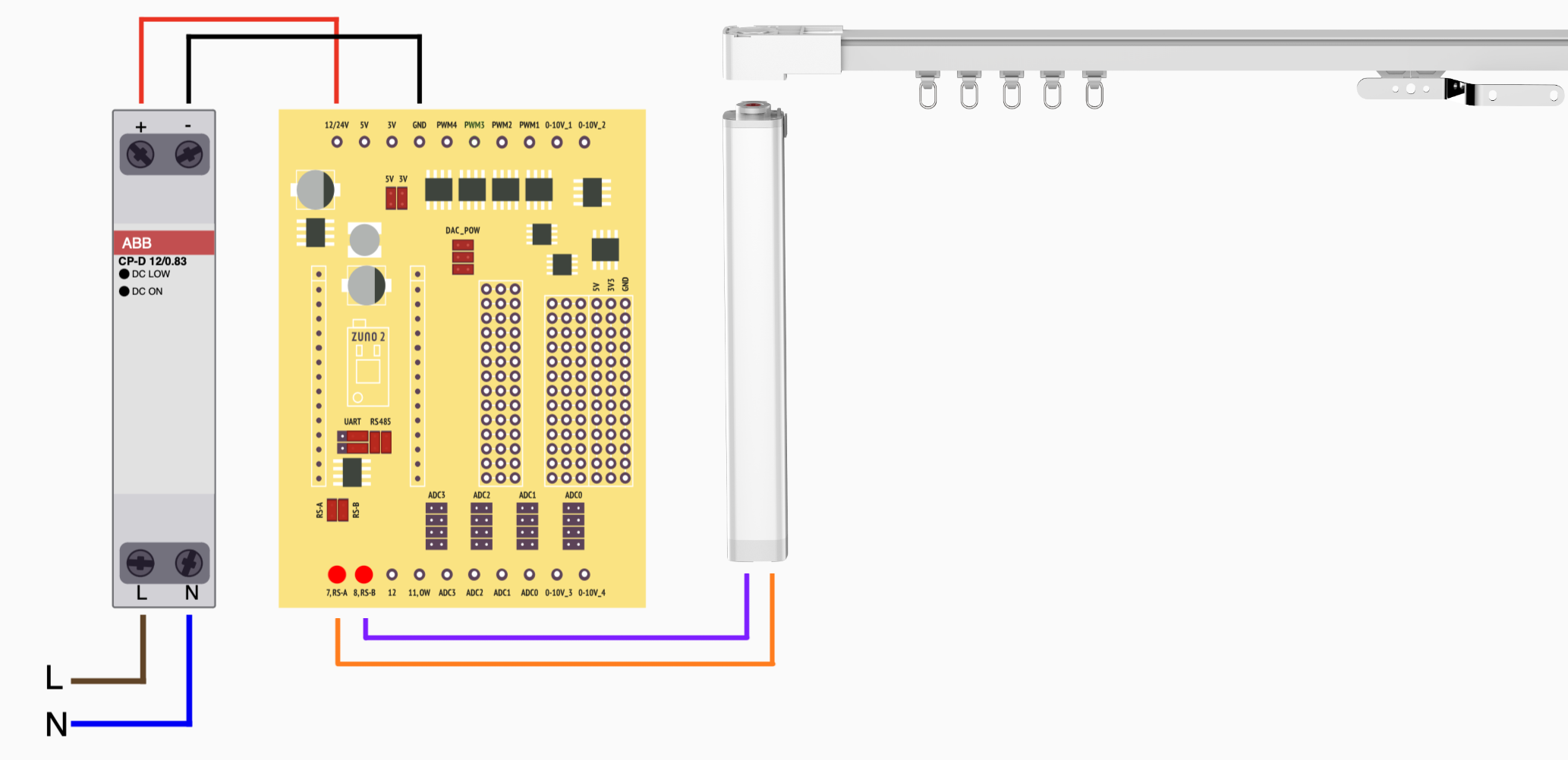
Dooya DT82TV curtain motor connected via RS-485
Every 5 seconds, Z-Uno reports the current position of the curtains.The following commands are available for control:
- Go up
- Go down
- Stop
- Set level
/*
* RS485_Blinds.ino
* RS485_Blinds
*
* Created by Vitaliy Yurkin on 26/11/2019.
* Copyright © 2019 Z-Wave.Me. All rights reserved.
*
* Control Dooya motors via RS485.
* Supported commands:
* -UP
* -DOWN
* -STOP
* -SET LEVEL
*
* When the position is changed the motor returns feedback
*/
// Maximum number of bytes received from uart
#define INCOMING_BYTES_COUNT 100
// Functions code
#define READ 0x01
#define WRITE 0x02
#define CONTROL 0x03
// Control commands
#define UP 0x01
#define DOWN 0x02
#define STOP 0x03
#define PERCENTAGE 0x04
// State machine
enum States {
WAIT_DATA,
PARSING_DATA,
SEND_DATA
};
byte bytesCount = 0;
byte incomingData[INCOMING_BYTES_COUNT];
byte state = WAIT_DATA;
byte commandToSend;
byte shadesLevel = 0;
byte lastShadesLevel = 0;
unsigned long lastLevelRequest = 0;
byte command[] = {0x55, 0xfe, 0xfe, 0x00, 0x00, 0x00, 0x00, 0x00};
/*
ZUNO_ENABLE(
DBG_CONSOLE_BAUDRATE=115200
LOGGING_DBG
//LOGGING_UART=Serial0
);
*/
ZUNO_SETUP_CHANNELS(ZUNO_BLINDS(getterBlinds, setterBlinds));
void setup() {
Serial1.begin(9600);
pinMode(2, OUTPUT);
digitalWrite(2, LOW);
}
void loop() {
switch(state) {
case WAIT_DATA:
getDataFromUART();
break;
case PARSING_DATA:
//LOGGING_UART.print("Parsing ");
//logData();
parsingData();
state = WAIT_DATA;
break;
case SEND_DATA:
//LOGGING_UART.print("Send data ");
sendDataToUART();
//logSendData();
state = WAIT_DATA;
break;
}
// Every 2 seconds check shades level
if ((millis() - lastLevelRequest) > 2000) {
lastLevelRequest = millis();
// 55 12 34 01 02 01 2B 4D
state = SEND_DATA;
command[3] = READ;
command[4] = 0x02;
command[5] = 0x01;
}
}
void logData() {
//LOGGING_UART.print("CPU -> Z-Uno: ");
//LOGGING_UART.dumpPrint(incomingData, 8);
//LOGGING_UART.println();
}
void logSendData() {
//LOGGING_UART.print("Z-Uno -> CPU: ");
//LOGGING_UART.dumpPrint(command, 8);
//LOGGING_UART.println();
}
void parsingData() {
// Read data from end
// FE 1 1 0 44 72
if (incomingData[bytesCount-5] == 0x01) {
shadesLevel = incomingData[bytesCount-3];
shadesLevel = shadesLevel == 100 ? 99 : shadesLevel;
if (lastShadesLevel != shadesLevel) {
lastShadesLevel = shadesLevel;
//LOGGING_UART.print("zunoSendReport: ");
//LOGGING_UART.println(shadesLevel);
zunoSendReport(1);
}
}
}
void getDataFromUART() {
byte incomingBytesRead = 0;
while (Serial1.available() > 0) {
incomingData[incomingBytesRead++] = Serial1.read();;
delay(5);
}
if (incomingBytesRead) {
bytesCount = incomingBytesRead;
state = PARSING_DATA;
}
}
void sendDataToUART() {
byte len;
if (command[4] == PERCENTAGE || command[3] == READ) {
word crc = modbus_crc16(command, 6);
command[6] = lowByte(crc);
command[7] = highByte(crc);
len = 8;
}
else {
word crc = modbus_crc16(command, 5);
command[5] = lowByte(crc);
command[6] = highByte(crc);
len = 7;
}
// Write bytes to serial port
digitalWrite(2, HIGH);
delay(5);
for (byte i = 0; i < len; i++) {
Serial1.write(command[i]);
}
delay(5);
digitalWrite(2, LOW);
}
// Getters && Setters
byte getterBlinds() {
return shadesLevel;
}
void setterBlinds(byte level) {
state = SEND_DATA;
command[3] = CONTROL;
if (level == 0) {
command[4] = DOWN;
}
else if (level == 99 || level == 255) {
command[4] = UP;
}
else {
command[4] = PERCENTAGE;
command[5] = level;
}
}
void zcustom_SWLStartStopHandler(uint8_t channel, bool start, bool up, uint8_t * p_cmd) {
(void)p_cmd;
(void)channel;
(void)up;
if (!start) {
state = SEND_DATA;
command[4] = STOP;
}
/*
Serial.print("StartStop Handler channel:");
Serial.print(channel);
Serial.print(" start:");
Serial.print(start);
Serial.print(" up:");
Serial.println(up);
*/
}
word modbus_crc16(byte* buf, int len) {
word crc = 0xFFFF;
for (int pos = 0; pos < len; pos++) {
crc ^= (word)buf[pos]; // XOR byte into least sig. byte of crc
for (int i = 8; i != 0; i--) { // Loop over each bit
if ((crc & 0x0001) != 0) { // If the LSB is set
crc >>= 1; // Shift right and XOR 0xA001
crc ^= 0xA001;
}
else // Else LSB is not set
crc >>= 1; // Just shift right
}
}
// Note, this number has low and high bytes swapped, so use it accordingly (or swap bytes)
return crc;
}
Download this sketch