OneWire temperature sensor DS18B20 and I2C LCD display
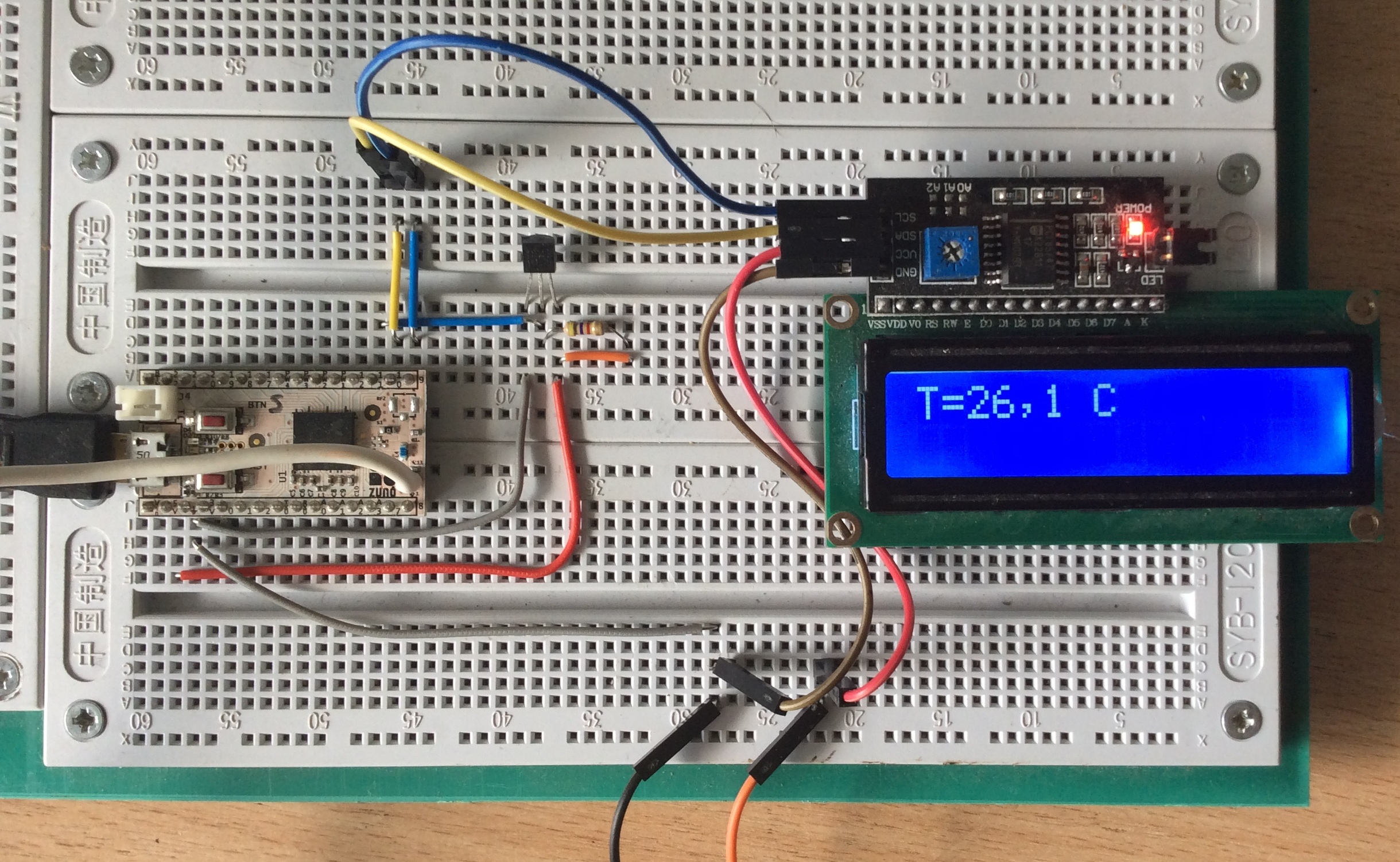
This sketch shows how to connect I2C LCD display and OneWire temperature sensor DS18B20 to the Z-Uno board. Temperature values is read from sensor, printed on the display and is periodically report to channel Multilevel Sensor.
Download Fritzing project
// demo sketch for connecting I2C LCD display and OneWire temperature sensor DS18B20 to Z-Uno
// add library Wire.h
#include "Wire.h"
#include "Print.h"
// add library ds18b20
#include "ZUNO_DS18B20.h"
// i2c address
#define LC_I2CADDR 0x27
// commands
#define LCD_CLEARDISPLAY 0x01
#define LCD_RETURNHOME 0x02
#define LCD_ENTRYMODESET 0x04
#define LCD_DISPLAYCONTROL 0x08
#define LCD_CURSORSHIFT 0x10
#define LCD_FUNCTIONSET 0x20
#define LCD_SETCGRAMADDR 0x40
#define LCD_SETDDRAMADDR 0x80
// flags for display entry mode
#define LCD_ENTRYRIGHT 0x00
#define LCD_ENTRYLEFT 0x02
#define LCD_ENTRYSHIFTINCREMENT 0x01
#define LCD_ENTRYSHIFTDECREMENT 0x00
// flags for display on/off control
#define LCD_DISPLAYON 0x04
#define LCD_DISPLAYOFF 0x00
#define LCD_CURSORON 0x02
#define LCD_CURSOROFF 0x00
#define LCD_BLINKON 0x01
#define LCD_BLINKOFF 0x00
// flags for display/cursor shift
#define LCD_DISPLAYMOVE 0x08
#define LCD_CURSORMOVE 0x00
#define LCD_MOVERIGHT 0x04
#define LCD_MOVELEFT 0x00
// flags for function set
#define LCD_8BITMODE 0x10
#define LCD_4BITMODE 0x00
#define LCD_2LINE 0x08
#define LCD_1LINE 0x00
#define LCD_5x10DOTS 0x04
#define LCD_5x8DOTS 0x00
// flags for backlight control
#define LCD_BACKLIGHT 0x08
#define LCD_NOBACKLIGHT 0x00
#define En 0x4 // Enable bit
#define Rw 0x2 // Read/Write bit
#define Rs 0x1 // Register select bit
int cols;
int rows;
int numlines;
int backlightval;
int displayfunction;
int displaycontrol;
int displaymode;
// pin connection ds18b20
#define PIN_DS18B20 11
// add library OneWire
OneWire ow(11);
// onewire connection temperature sensors
DS18B20Sensor ds1820(&ow);
byte addr1[8];
int temp;
// set up channel
ZUNO_SETUP_CHANNELS(
ZUNO_SENSOR_MULTILEVEL(ZUNO_SENSOR_MULTILEVEL_TYPE_TEMPERATURE,
SENSOR_MULTILEVEL_SCALE_CELSIUS,
SENSOR_MULTILEVEL_SIZE_TWO_BYTES,
SENSOR_MULTILEVEL_PRECISION_ONE_DECIMAL,
getterTemp)
);
void setup() {
Serial.begin();
Serial.println("start");
lcdbegin(16,2);
}
void loop() {
// obtaining readings from the sensor ds18b20
temp=getTempds18b20();
// print temp display
printTempds18b20(temp);
// send data to channel
zunoSendReport(1);
// send every 30 second
delay(30000);
}
int getTempds18b20() {
// search OneWire device
if(ds1820.scanAloneSensor(addr1)==1) {
for(int i = 0; i < 8; i++) {
// print OneWire kod
Serial.print(addr1[i], HEX);
Serial.print(" ");
}
Serial.println();
Serial.print("t=");
// receiving data from the sensor
temp=ds1820.getTempC100(addr1)/10;
Serial.println(temp);
} else {
Serial.println("error");
temp=1000;
}
return temp;
}
word getterTemp() {
return temp;
}
void printTempds18b20(int temp) {
clear();
setCursor(0,0);
write('T');
write('=');
if(temp<100) {
write(32);
} else {
write(temp/100+48);
}
write((temp%100)/10+48);
write(44);
write((temp%100)%10+48);
write(32);
write('C');
return;
}
void lcdbegin(int c,int r) {
//
cols=c;
rows=r;
backlightval = LCD_BACKLIGHT;
//
Wire.begin();
displayfunction = LCD_4BITMODE | LCD_1LINE | LCD_5x8DOTS;
//
if (rows > 1) {
displayfunction |= LCD_2LINE;
}
numlines = rows;
// SEE PAGE 45/46 FOR INITIALIZATION SPECIFICATION!
// according to datasheet, we need at least 40ms after power rises above 2.7V
// before sending commands. Arduino can turn on way befer 4.5V so we'll wait 50
delay(50);
// Now we pull both RS and R/W low to begin commands
expanderWrite(backlightval); // reset expanderand turn backlight off (Bit 8 =1)
delay(1000);
//put the LCD into 4 bit mode
// this is according to the hitachi HD44780 datasheet
// figure 24, pg 46
// we start in 8bit mode, try to set 4 bit mode
write4bits(0x03 << 4);
delayMicroseconds(4500); // wait min 4.1ms
// second try
write4bits(0x03 << 4);
delayMicroseconds(4500); // wait min 4.1ms
// third go!
write4bits(0x03 << 4);
delayMicroseconds(150);
// finally, set to 4-bit interface
write4bits(0x02 << 4);
// set # lines, font size, etc.
command(LCD_FUNCTIONSET | displayfunction);
// turn the display on with no cursor or blinking default
displaycontrol = LCD_DISPLAYON | LCD_CURSOROFF | LCD_BLINKOFF;
display();
// clear it off
clear();
// Initialize to default text direction (for roman languages)
displaymode = LCD_ENTRYLEFT | LCD_ENTRYSHIFTDECREMENT;
// set the entry mode
command(LCD_ENTRYMODESET | displaymode);
home();
}
/********** high level commands, for the user! */
void clear(){
command(LCD_CLEARDISPLAY);// clear display, set cursor position to zero
delayMicroseconds(2000); // this command takes a long time!
}
void home(){
command(LCD_RETURNHOME); // set cursor position to zero
delayMicroseconds(2000); // this command takes a long time!
}
void setCursor(uint8_t col, uint8_t row){
int row_offsets[] = { 0x00, 0x40, 0x14, 0x54 };
if ( row > numlines ) {
row = numlines-1; // we count rows starting w/0
}
command(LCD_SETDDRAMADDR | (col + row_offsets[row]));
}
// Turn the display on/off (quickly)
void noDisplay() {
displaycontrol &= ~LCD_DISPLAYON;
command(LCD_DISPLAYCONTROL | displaycontrol);
}
void display() {
displaycontrol |= LCD_DISPLAYON;
command(LCD_DISPLAYCONTROL | displaycontrol);
}
inline void command(uint8_t value) {
send(value, 0);
}
inline size_t write(uint8_t value) {
send(value, Rs);
return 0;
}
/************ low level data pushing commands **********/
// write either command or data
void send(uint8_t value, uint8_t mode) {
uint8_t highnib=value&0xf0;
uint8_t lownib=(value<<4)&0xf0;
write4bits((highnib)|mode);
write4bits((lownib)|mode);
}
void write4bits(uint8_t value) {
expanderWrite(value);
pulseEnable(value);
}
void expanderWrite(uint8_t _data){
Wire.beginTransmission(LC_I2CADDR);
Wire.write((int)(_data) | backlightval);
Wire.endTransmission();
}
void pulseEnable(uint8_t _data){
expanderWrite(_data | En); // En high
delayMicroseconds(1); // enable pulse must be >450ns
expanderWrite(_data & ~En); // En low
delayMicroseconds(50); // commands need > 37us to settle
}
Download this sketch
// demo sketch for connecting I2C LCD display and OneWire temperature sensor DS18B20 to Z-Uno
// add library Wire.h
#include "Wire.h"
#include "Print.h"
// add library ds18b20
#include "ZUNO_DS18B20.h"
// i2c address
#define LC_I2CADDR 0x27
// commands
#define LCD_CLEARDISPLAY 0x01
#define LCD_RETURNHOME 0x02
#define LCD_ENTRYMODESET 0x04
#define LCD_DISPLAYCONTROL 0x08
#define LCD_CURSORSHIFT 0x10
#define LCD_FUNCTIONSET 0x20
#define LCD_SETCGRAMADDR 0x40
#define LCD_SETDDRAMADDR 0x80
// flags for display entry mode
#define LCD_ENTRYRIGHT 0x00
#define LCD_ENTRYLEFT 0x02
#define LCD_ENTRYSHIFTINCREMENT 0x01
#define LCD_ENTRYSHIFTDECREMENT 0x00
// flags for display on/off control
#define LCD_DISPLAYON 0x04
#define LCD_DISPLAYOFF 0x00
#define LCD_CURSORON 0x02
#define LCD_CURSOROFF 0x00
#define LCD_BLINKON 0x01
#define LCD_BLINKOFF 0x00
// flags for display/cursor shift
#define LCD_DISPLAYMOVE 0x08
#define LCD_CURSORMOVE 0x00
#define LCD_MOVERIGHT 0x04
#define LCD_MOVELEFT 0x00
// flags for function set
#define LCD_8BITMODE 0x10
#define LCD_4BITMODE 0x00
#define LCD_2LINE 0x08
#define LCD_1LINE 0x00
#define LCD_5x10DOTS 0x04
#define LCD_5x8DOTS 0x00
// flags for backlight control
#define LCD_BACKLIGHT 0x08
#define LCD_NOBACKLIGHT 0x00
#define En 0x4 // Enable bit
#define Rw 0x2 // Read/Write bit
#define Rs 0x1 // Register select bit
int cols;
int rows;
int numlines;
int backlightval;
int displayfunction;
int displaycontrol;
int displaymode;
// pin connection ds18b20
#define PIN_DS18B20 11
// add library OneWire
OneWire ow(11);
// onewire connection temperature sensors
DS18B20Sensor ds1820(&ow);
byte addr1[8];
int temp;
// set up channel
ZUNO_SETUP_CHANNELS(
ZUNO_SENSOR_MULTILEVEL(ZUNO_SENSOR_MULTILEVEL_TYPE_TEMPERATURE,
SENSOR_MULTILEVEL_SCALE_CELSIUS,
SENSOR_MULTILEVEL_SIZE_TWO_BYTES,
SENSOR_MULTILEVEL_PRECISION_ONE_DECIMAL,
getterTemp)
);
void setup() {
Serial.begin();
Serial.println("start");
lcdbegin(16,2);
}
void loop() {
// obtaining readings from the sensor ds18b20
temp=getTempds18b20();
// print temp display
printTempds18b20(temp);
// send data to channel
zunoSendReport(1);
// send every 30 second
delay(30000);
}
int getTempds18b20() {
// search OneWire device
if(ds1820.scanAloneSensor(addr1)==1) {
for(int i = 0; i < 8; i++) {
// print OneWire kod
Serial.print(addr1[i], HEX);
Serial.print(" ");
}
Serial.println();
Serial.print("t=");
// receiving data from the sensor
temp=ds1820.getTempC100(addr1)/10;
Serial.println(temp);
} else {
Serial.println("error");
temp=1000;
}
return temp;
}
word getterTemp() {
return temp;
}
void printTempds18b20(int temp) {
clear();
setCursor(0,0);
write('T');
write('=');
if(temp<100) {
write(32);
} else {
write(temp/100+48);
}
write((temp%100)/10+48);
write(44);
write((temp%100)%10+48);
write(32);
write('C');
return;
}
void lcdbegin(int c,int r) {
//
cols=c;
rows=r;
backlightval = LCD_BACKLIGHT;
//
Wire.begin();
displayfunction = LCD_4BITMODE | LCD_1LINE | LCD_5x8DOTS;
//
if (rows > 1) {
displayfunction |= LCD_2LINE;
}
numlines = rows;
// SEE PAGE 45/46 FOR INITIALIZATION SPECIFICATION!
// according to datasheet, we need at least 40ms after power rises above 2.7V
// before sending commands. Arduino can turn on way befer 4.5V so we'll wait 50
delay(50);
// Now we pull both RS and R/W low to begin commands
expanderWrite(backlightval); // reset expanderand turn backlight off (Bit 8 =1)
delay(1000);
//put the LCD into 4 bit mode
// this is according to the hitachi HD44780 datasheet
// figure 24, pg 46
// we start in 8bit mode, try to set 4 bit mode
write4bits(0x03 << 4);
delayMicroseconds(500); // wait min 4.1ms
delay(4);
// second try
write4bits(0x03 << 4);
delayMicroseconds(500); // wait min 4.1ms
delay(4);
// third go!
write4bits(0x03 << 4);
delayMicroseconds(150);
// finally, set to 4-bit interface
write4bits(0x02 << 4);
// set # lines, font size, etc.
command(LCD_FUNCTIONSET | displayfunction);
// turn the display on with no cursor or blinking default
displaycontrol = LCD_DISPLAYON | LCD_CURSOROFF | LCD_BLINKOFF;
display();
// clear it off
clear();
// Initialize to default text direction (for roman languages)
displaymode = LCD_ENTRYLEFT | LCD_ENTRYSHIFTDECREMENT;
// set the entry mode
command(LCD_ENTRYMODESET | displaymode);
home();
}
/********** high level commands, for the user! */
void clear(){
command(LCD_CLEARDISPLAY);// clear display, set cursor position to zero
delay(2); // this command takes a long time!
}
void home(){
command(LCD_RETURNHOME); // set cursor position to zero
delay(2); // this command takes a long time!
}
void setCursor(uint8_t col, uint8_t row){
int row_offsets[] = { 0x00, 0x40, 0x14, 0x54 };
if ( row > numlines ) {
row = numlines-1; // we count rows starting w/0
}
command(LCD_SETDDRAMADDR | (col + row_offsets[row]));
}
// Turn the display on/off (quickly)
void noDisplay() {
displaycontrol &= ~LCD_DISPLAYON;
command(LCD_DISPLAYCONTROL | displaycontrol);
}
void display() {
displaycontrol |= LCD_DISPLAYON;
command(LCD_DISPLAYCONTROL | displaycontrol);
}
inline void command(uint8_t value) {
send(value, 0);
}
inline size_t write(uint8_t value) {
send(value, Rs);
return 0;
}
/************ low level data pushing commands **********/
// write either command or data
void send(uint8_t value, uint8_t mode) {
uint8_t highnib=value&0xf0;
uint8_t lownib=(value<<4)&0xf0;
write4bits((highnib)|mode);
write4bits((lownib)|mode);
}
void write4bits(uint8_t value) {
expanderWrite(value);
pulseEnable(value);
}
void expanderWrite(uint8_t _data){
Wire.beginTransmission(LC_I2CADDR);
Wire.write((int)(_data) | backlightval);
Wire.endTransmission();
}
void pulseEnable(uint8_t _data){
expanderWrite(_data | En); // En high
delayMicroseconds(1); // enable pulse must be >450ns
expanderWrite(_data & ~En); // En low
delayMicroseconds(50); // commands need > 37us to settle
}
Download this sketch